


Уравнение движения тела
В том случае, если мы имеем дело с твердым телом, которое в общем случае имеет 6 степеней свободы, то общая система уравнений движения должна содержать шесть независимых уравнений. Их можно представить в виде производных по времени от двух векторов: импульса и момента импульса тела.
Общие законы и уравнения движения системы тел
Произвольную систему тел всегда можно свести к системе материальных точек. Это видно из того, что отдельное тело конечных размеров всегда мысленно можно разбить на столь малые части (частицы), что каждую часть можно рассматривать как материальную точку. Таким образом, выясняя общие законы движения системы тел, можно исходить из представления о системе материальных точек. Соответственно, имеем первое уравнение:
![\[\frac{d\overline{p}}{dt}=\overline{F}\ (1)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-8ecf5341fe25e2d6190e4d5555ba62a8_l3.png "Rendered by QuickLaTeX.com")
где  — полный импульс тела,
— полный импульс тела,  – результирующая внешних сил, действующих на тело.
– результирующая внешних сил, действующих на тело.
В случае поступательного движения твердого тела его скорость  скорости центра масс этого тела:
скорости центра масс этого тела:  . Соответственно, основное уравнение динамики поступательного движения твердого тела имеет вид:
. Соответственно, основное уравнение динамики поступательного движения твердого тела имеет вид:
![\[\frac{d}{dt}\left(m\overline{v}\right)={\overline{F}}^{vnesh}(2)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-953b7d99d87cc20173e1873df7ec812a_l3.png "Rendered by QuickLaTeX.com")
или
![\[\overline{a}=\frac{{\overline{F}}^{vnesh}}{m}\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-d99d2fb68735fd6ae19e547b6c1fd4c9_l3.png "Rendered by QuickLaTeX.com")
где  — масса тела,
— масса тела,  — его ускорение.
— его ускорение.
Второе уравнение движения записывается для тела вращающегося относительно неподвижной точки (полюса), и имеет вид:
![\[\frac{d\overline{L}}{dt}={\overline{M}}^{vnesh}\ \left(3\right)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-bfbbe8cd0c1c35dfdf2f8f2b1086b16d_l3.png "Rendered by QuickLaTeX.com")
где  — момент импульса,
— момент импульса,  — момент внешних сил, приложенных к телу.
— момент внешних сил, приложенных к телу.
Уравнение движения твердого тела
Уравнение динамики твердого тела, вращающегося вокруг неподвижной точки О, в жестко связанной с телом подвижной системе координат (x’,y’,z’), начало которой находится в точке О, имеет вид:
![\[\frac{\hat{d}\overline{L}}{dt}={\overline{M}}^{vnesh}-\overline{w}\times \overline{L\ }\left(4\right)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-e08d05d654453ac887cc8144ccfaf6bb_l3.png "Rendered by QuickLaTeX.com")
где  — угловая скорость вращения тела, а
— угловая скорость вращения тела, а  — относительная производная по времени от вектора
— относительная производная по времени от вектора  — орты подвижной системы.
— орты подвижной системы.
Если оси подвижной системы координат совпадают с главными осями инерции тела в точке О, то уравнения движения тела в проекциях на эти оси имеют вид:
![\[J_1\dot{w_1}+(J_3-J_2)w_2w_3=M_1,\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-c2cfd415f76952995aa03bffdd5ea716_l3.png "Rendered by QuickLaTeX.com")
![\[J_2\dot{w_2}+(J_1-J_3)w_1w_3=M_2,\ \ (5)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-729a84fb6b76b5867704f8eee36049de_l3.png "Rendered by QuickLaTeX.com")
![\[J_3\dot{w_3}+(J_2-J_1)w_1w_2=M_3,\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-3b0a3ee08dbb85808de52e957e09d23d_l3.png "Rendered by QuickLaTeX.com")
где  – главные моменты инерции тела в точке О,
– главные моменты инерции тела в точке О,  – проекции вектора угловой скорости тела на главные оси инерции,
– проекции вектора угловой скорости тела на главные оси инерции,  – моменты внешних сил относительно тех же осей. Эти уравнения называют динамическими уравнениями Эйлера.
– моменты внешних сил относительно тех же осей. Эти уравнения называют динамическими уравнениями Эйлера.
Уравнение движения тела, вращающегося вокруг неподвижной оси
Уравнение движения тела, вращающегося вокруг неподвижной оси (например, оси Оz):
![\[\frac{dL_z}{dt}={M_z}^{vnesh}\ \left(6\right)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-2604bd80091485715a881786f347c60d_l3.png "Rendered by QuickLaTeX.com")
или
![\[\frac{d}{dt}\left(J_zw_z\right)={M_z}^{vnesh}\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-8417f2bee14725b5d60894126bdfe310_l3.png "Rendered by QuickLaTeX.com")
где  – момент инерции тела относительно оси Oz. Если тело не деформируется, то — постоянная, тогда уравнение движения:
– момент инерции тела относительно оси Oz. Если тело не деформируется, то — постоянная, тогда уравнение движения:
![\[J_z{\varepsilon }_z={M_z}^{vnesh}\ \left(7\right)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-ec122ae9406497d4f370d7f09ef1789f_l3.png "Rendered by QuickLaTeX.com")
где  – угловое ускорение тела.
– угловое ускорение тела.
Свободное твердое тело в общем случае участвует одновременно в двух движениях- поступательном со скоростью  центра масс и вращательном вокруг центра масс с угловой скоростью . Векторы и удовлетворяют двум дифференциальным уравнениям движения свободного тела (которые получают из 2 и 3), подстановкой соответствующих скоростей центра масс:
центра масс и вращательном вокруг центра масс с угловой скоростью . Векторы и удовлетворяют двум дифференциальным уравнениям движения свободного тела (которые получают из 2 и 3), подстановкой соответствующих скоростей центра масс:
![\[\frac{d}{dt}\left(m\overline{v_c}\right)={\overline{F}}^{vnesh}\ (8)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-16a277e12699ff7c582d4121751f427c_l3.png "Rendered by QuickLaTeX.com")
![\[\frac{d\overline{L'_c}}{dt}={\overline{M}}^{vnesh}_c\ (9)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-1fd3cae8049a4c0ef72a4fd1ef67316c_l3.png "Rendered by QuickLaTeX.com")
где m- масса тела, — скорость центра масс,  — вектор результирующей внешней силы,
— вектор результирующей внешней силы,  — вектор результирующий моментов внешних сил относительно центра масс C,
— вектор результирующий моментов внешних сил относительно центра масс C,  , где
, где  — радиус вектор и скорость малого элемента массой dm в поступательно движущейся системе координат с началом в точке C.
— радиус вектор и скорость малого элемента массой dm в поступательно движущейся системе координат с началом в точке C.
Примеры решения задач
| Задание |
Тело брошено под углом  к горизонту с начальной скоростью к горизонту с начальной скоростью  . Напишите уравнение траектории движения тела. . Напишите уравнение траектории движения тела.
|
| Решение | Сделаем рисунок
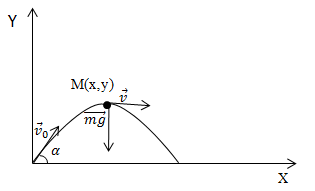
рис. 1 Тело движется под действием постоянной силы тяжести , следовательно Запишем проекции на оси Ox и Oy уравнения (1.1): Проинтегрируем (1.2) по времени, При интегрировании учтем, что начало координат мы поместили в точку бросания, соответственно Выразим время из x подставим в y получим уравнение траектории движения тела: |
| Ответ | Уравнение траектории движения тела при заданных условиях: 
|
 , которая направлена вертикально вниз (рис. 1). Для произвольной точки M(x,y) имеем:
, которая направлена вертикально вниз (рис. 1). Для произвольной точки M(x,y) имеем:![\[ \frac{d}{dt}\left(m\overline{v}\right)={\overline{F}}^{vnesh}=const=\overline{mg} \]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-3841a9403b7ad31b91879bec2c2fc96b_l3.png "Rendered by QuickLaTeX.com")
 , или
, или  .
.![\[v_x=v_0\cos\alpha ,\ \ v_y=v_0\sin\alpha -gt\ (1.2)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-10484ca1bc4303a56f08336709164c8d_l3.png "Rendered by QuickLaTeX.com")
 , получим:
, получим:![\[x=v_0t\ \cos\alpha ,\ y=v_0t\ \sin\alpha -\frac{gt^2}{2}\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-da8eef8a60e9d730ba59a0ce94ded223_l3.png "Rendered by QuickLaTeX.com")
![\[y=x\text{tg}\alpha -\frac{gx^2}{2v^2_0\cos^2\alpha }\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-60f2d98b9fab1582c68a717951c51609_l3.png "Rendered by QuickLaTeX.com")
| Задание | На рисунке дан график угловой скорости твердого тела вращающегося вокруг оси (рис. 2). Укажите точку на графике, соответствующую нулевому значению момента сил, приложенных к телу.
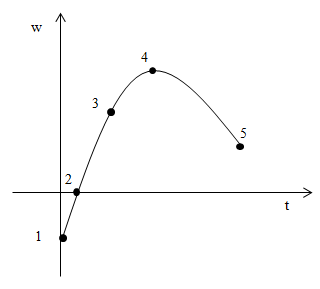
рис. 2 |
| Решение | Запишем уравнение движения для вращающегося тела:
Для твердого тела момент инерции тела от времени не зависит, то есть
|
| Ответ | Точка 4 на рис. 2 соответствует нулевому значению момента сил, приложенных к телу. |
![\[\frac{d}{dt}\left(J_zw_z\right)={M_z}^{vnesh}\ (2.1)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-179f8fe44e9c12fd38c65eaddd6b6f8d_l3.png "Rendered by QuickLaTeX.com")
 (2.2), момент инерции нулю не может быть равен, следовательно, необходимо найти точку на графике, в которой равна нулю производная от угловой скорости. Такой точкой, является
(2.2), момент инерции нулю не может быть равен, следовательно, необходимо найти точку на графике, в которой равна нулю производная от угловой скорости. Такой точкой, является  в точке 4, отсюда следует, что
в точке 4, отсюда следует, что  в точке 4.
в точке 4.





